OBJECTIVE
- To present my quadruped robot prototype on the Exhibition day.
- To explain my project based on the presentation poster.
METHODOLOGY
- Going to the UniKL BMI Gemilang Hall before 9 am on Wednesday, October 24th.
- Register for presentation.
- Set up the poster and quadruped robot prototype.
- Present the project to the assessors with confident.
RESULT
The following pictures are taken on the final year project 2 Exhibition day.

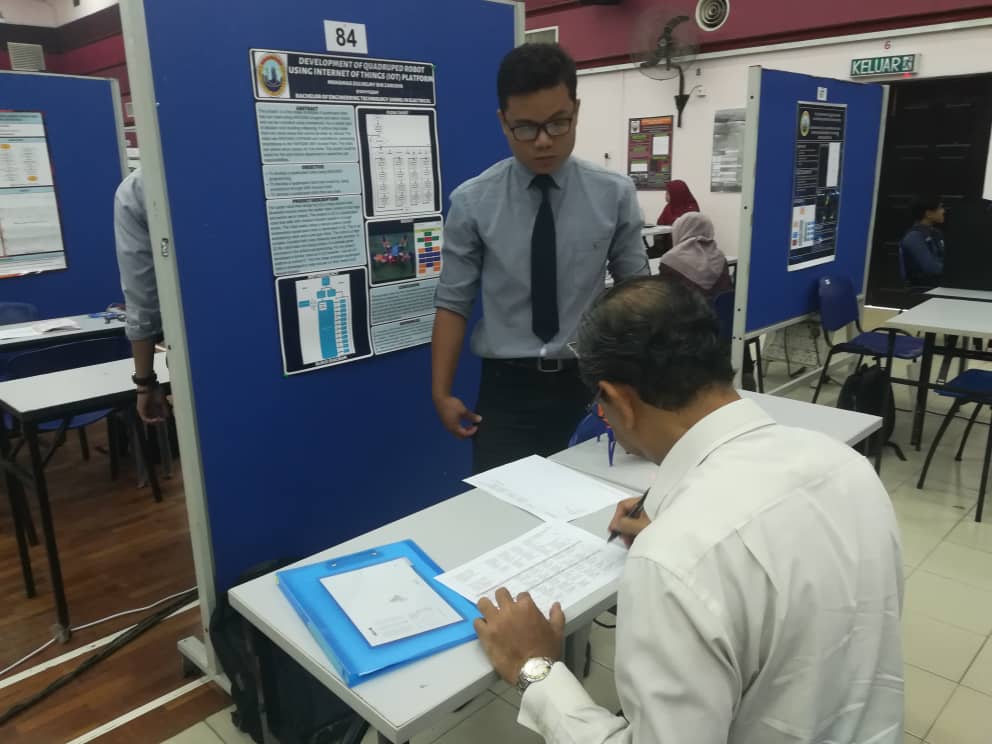

ANALYSIS/DISCUSSION
The presentation going well. There are no problem with the project. The quadruped robot works perfectly. The assessors are satisfied with the presentation. After presenting to the assessors, I do some explanation and demonstration to the other students that interested with my project. I finish assessed at 10 am. The Exhibition day ends at 12 afternoon.
CONCLUSION
In conclusion, both of the assessors which was Professor Dr. Badri and a research engineer from UNITEN was satisfied with my presentation. The quadruped robot works perfectly without any problem. Thus, the presentation was going as planned.









